題-1.png?5pyq5qCH6aKYLTEucG5n)



Nav3D復(fù)雜環(huán)境衛(wèi)星遮擋及多徑效應(yīng)仿真軟件基于真實環(huán)境的建模仿真場景,模擬GNSS信號在特定環(huán)境中的傳播效應(yīng),我們自主研發(fā)了一套復(fù)雜的幾何和物理編輯器,利用創(chuàng)建3D合成環(huán)境或真實的3D地圖,配合光線追蹤技術(shù),來計算和分析GNSS信號在復(fù)雜環(huán)境中的傳播路徑,為國內(nèi)首創(chuàng)。
Nav3D復(fù)雜環(huán)境衛(wèi)星遮擋及多徑效應(yīng)仿真軟件基于真實環(huán)境的建模仿真場景,模擬GNSS信號在特定環(huán)境中的傳播效應(yīng),我們自主研發(fā)了一套復(fù)雜的幾何和物理編輯器,利用創(chuàng)建3D合成環(huán)境或真實的3D地圖,配合光線追蹤技術(shù),來計算和分析GNSS信號在復(fù)雜環(huán)境中的傳播路徑,為國內(nèi)首創(chuàng),對標(biāo)國外同類Sim3D仿真軟件產(chǎn)品。
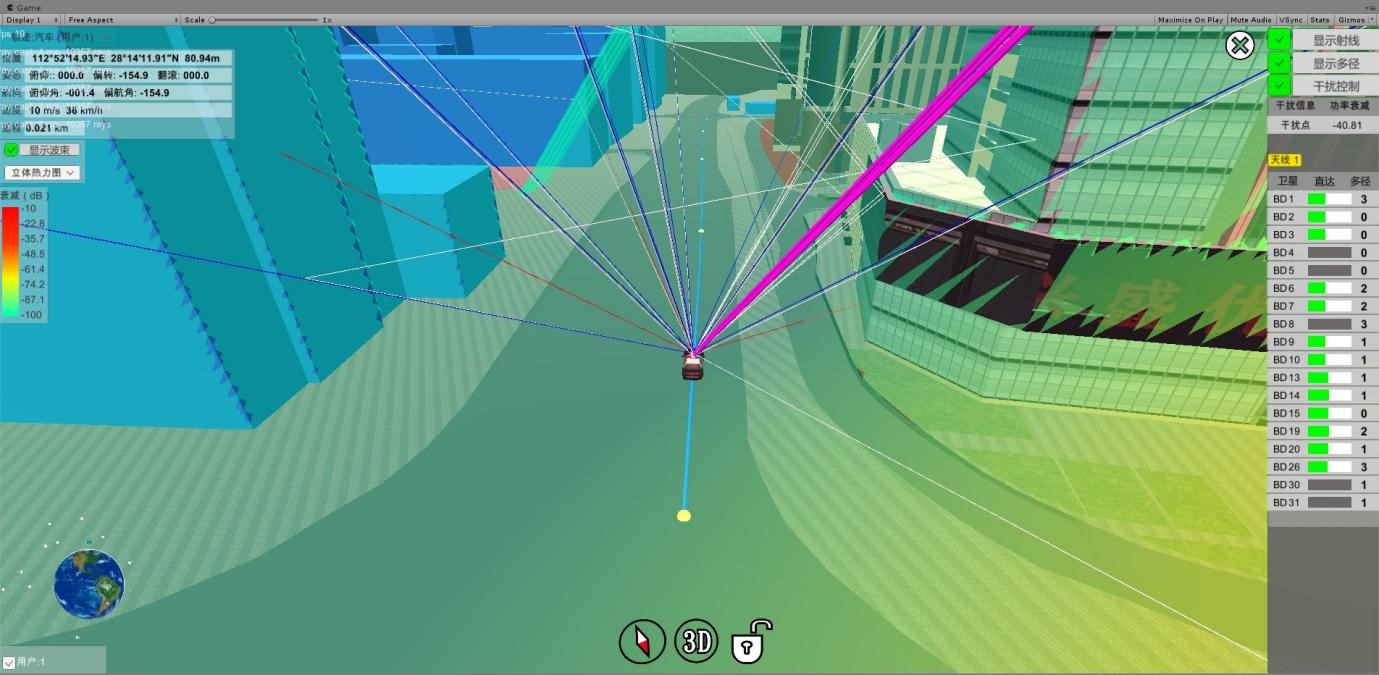
Nav3D仿真模擬時,衛(wèi)星導(dǎo)航信號會與真實的3D環(huán)境交互,模擬出真實的信號路徑,并控制模擬器輸出逼真的射頻信號。實際輸出的信號中同時包括街道、高架橋、峽谷等周圍環(huán)境對衛(wèi)星直達信號的遮擋;地面、樹木、建筑、高山,峽谷等對衛(wèi)星的一次或多次反射,并考慮反射角度、面積、反射系數(shù)等各因素,把可能的多徑信號的功率衰減與時延等都進行仿真,相關(guān)信號可更好滿足高精度、抗干擾等測試中對信號遮擋和多徑效應(yīng)的需求。
Nav3D仿真模擬時,衛(wèi)星導(dǎo)航信號會與真實的3D環(huán)境交互,模擬出真實的信號路徑,并控制模擬器輸出逼真的射頻信號。
 具備信號傳播模擬功能,可模擬衛(wèi)星導(dǎo)航信號從衛(wèi)星天線發(fā)射后,在傳播途中發(fā)生的延遲、反射和衍射對導(dǎo)航信號方向、功率、頻率和時延的改變。
具備信號傳播模擬功能,可模擬衛(wèi)星導(dǎo)航信號從衛(wèi)星天線發(fā)射后,在傳播途中發(fā)生的延遲、反射和衍射對導(dǎo)航信號方向、功率、頻率和時延的改變。 具備載體/載具模擬功能,可模擬飛行器垂直發(fā)射的升空飛行、垂直飛行、水平飛行,以及各個位置轉(zhuǎn)向、自身旋轉(zhuǎn)、組合飛行等姿態(tài)變化對導(dǎo)航信號接收的影響。
具備載體/載具模擬功能,可模擬飛行器垂直發(fā)射的升空飛行、垂直飛行、水平飛行,以及各個位置轉(zhuǎn)向、自身旋轉(zhuǎn)、組合飛行等姿態(tài)變化對導(dǎo)航信號接收的影響。 具備載體/載具模擬功能,可模擬民航客機、直升機和無人機在起飛、降落和飛行過程中姿態(tài)變化對導(dǎo)航信號接收的影響。
具備載體/載具模擬功能,可模擬民航客機、直升機和無人機在起飛、降落和飛行過程中姿態(tài)變化對導(dǎo)航信號接收的影響。 具備載體/載具模擬功能,可模擬艦船在海面行駛過程中受海浪引起的姿態(tài)變化,對安裝在船體上單個或多個位置導(dǎo)航設(shè)備接收導(dǎo)航信號的影響。
具備載體/載具模擬功能,可模擬艦船在海面行駛過程中受海浪引起的姿態(tài)變化,對安裝在船體上單個或多個位置導(dǎo)航設(shè)備接收導(dǎo)航信號的影響。 具備載體/載具模擬功能,可模擬汽車在上坡、下坡、路面不平或轉(zhuǎn)彎造成的傾斜狀態(tài)下,對裝配在車頂?shù)奶炀€和放置于車輛內(nèi)部的手機接收導(dǎo)航信號的影響。
具備載體/載具模擬功能,可模擬汽車在上坡、下坡、路面不平或轉(zhuǎn)彎造成的傾斜狀態(tài)下,對裝配在車頂?shù)奶炀€和放置于車輛內(nèi)部的手機接收導(dǎo)航信號的影響。 具備載體/載具模擬功能,可模擬行人在運動、靜止?fàn)顟B(tài)下,姿態(tài)對穿戴導(dǎo)航設(shè)備接收導(dǎo)航信號的影響,包括佩戴的智能手表、手握或放置口袋的手機等。
具備載體/載具模擬功能,可模擬行人在運動、靜止?fàn)顟B(tài)下,姿態(tài)對穿戴導(dǎo)航設(shè)備接收導(dǎo)航信號的影響,包括佩戴的智能手表、手握或放置口袋的手機等。 具備建筑物模擬功能,包括樓房、橋梁、隧道、建筑物模型的系統(tǒng)自建模,真實環(huán)境模型的導(dǎo)入以及第三方地圖的數(shù)據(jù)導(dǎo)入。
具備建筑物模擬功能,包括樓房、橋梁、隧道、建筑物模型的系統(tǒng)自建模,真實環(huán)境模型的導(dǎo)入以及第三方地圖的數(shù)據(jù)導(dǎo)入。 具備地形模擬功能,包括對地表的形狀模擬(山脈、峽谷、盆地、平原等)和地表覆蓋物的模擬(淡水、海水、樹木、草、沙土、巖石以及人工修建路面)。
具備地形模擬功能,包括對地表的形狀模擬(山脈、峽谷、盆地、平原等)和地表覆蓋物的模擬(淡水、海水、樹木、草、沙土、巖石以及人工修建路面)。采用GPU并行加速遍歷光束樹,算法效率提高14倍。
|
采用GPU并行加速遍歷光束樹,算法效率提高14倍。 |
|
|
能以100Hz的頻度實時仿真四大導(dǎo)航系統(tǒng)、32路多徑信號。 |
|
|
支持高達100萬三角形的3D場景建模。 |
|
|
支持環(huán)境模型的參數(shù)自定義,可對3D模型的表面材料,電磁波反射系數(shù),多徑信號偽距變化速率等參數(shù)進行精準(zhǔn)設(shè)置。 |
|
|
支持多徑數(shù)量: |
0~32路可自定義。 |
|
多徑反射次數(shù): |
1~6次可自定義。 |
|
環(huán)境模型:簡單3D模型、近似3D模型、真實3D模型。 |
|
|
簡單3D模型: |
使用Nav3D內(nèi)置地形和建筑物模型,手動編輯,自動生成3D環(huán)境模型。 |
|
近似3D模型 |
使用地圖公司提供的建筑物和地形模型數(shù)據(jù),在線實時生成3D環(huán)境模型。 |
|
真實3D模型: |
使用無人機傾斜攝影,經(jīng)后期建模、校正和表面精細化處理等操作,生成3D環(huán)境模型。 |
|
載體模型:內(nèi)置模型、載入模型。 |
|
|
內(nèi)置模型: |
內(nèi)置多種載體模型,如行人、汽車、直升飛機、衛(wèi)星等載體,可快速實現(xiàn)GNSS信號受載體自身遮擋效應(yīng)的模擬。 |
|
載入模型: |
內(nèi)置載體無法滿足需求時,通過因特網(wǎng)或其他方式獲取的載體模型可導(dǎo)入Nav3D使用,支持的模型格式有3DS、SKP、OBJ、FBX。 |
|
支持多載體同時模擬,同時模擬的載體種類無限制,可選載體庫中的任意載體。 |
|
|
最多可支持4載體的單天線模擬,載體間以固定位置或變化位置保持同步,可實現(xiàn)多載體的同步編隊模擬。 |
|
|
載體天線:支持單載體多天線設(shè)置,單個載體最多可掛載3個接收天線,各天線的位置可自由配置,接收天線的衰減模型可自由配合或外部導(dǎo)入。 |
|
|
載體軌跡:支持3D可視化編輯和在線地圖編輯等多種方式。 |
|
|
預(yù)留天氣數(shù)據(jù)導(dǎo)入接口,支持外部天氣模型數(shù)據(jù)的導(dǎo)入。 |
|
| 仿真信號規(guī)模 | |
| 衛(wèi)星通道數(shù)量 | |
| 多徑信號數(shù)量 | |
| 信號精度 | |
| 偽距精度 | |
| 偽距變化率精度 | |
| 通道一致性 | |
| 信號動態(tài) | |
| 仿真高程 | |
| 相對速度 | |
| 相對加速度 | |
| 相對加加速度 | |
| 外部軌跡實時性 | |
| 信號延遲 | |
| 數(shù)據(jù)更新率 | |
| 信號質(zhì)量 | |
| 雜波抑制 | |
| 諧波抑制 | |
| 信號電平 | |
| 電平調(diào)節(jié)范圍 | |
| 電平調(diào)節(jié)步進 | |
| 物理和電氣性能 | |
| 整機尺寸 | |
| 整機重量 | |
| 電源、功耗 | |
PNT測試領(lǐng)域的最佳選擇,全套實景建模與復(fù)雜環(huán)境模擬能力,半實物仿真實時性高達1ms。
需要幫助或者遇到問題?
聯(lián)系我們